Setting up the Collective pitch / throttle by Dr Colin MillPublication: W3MH issue 3Setting up the Collective pitch / throttleNow this is where I start to get into trouble! Why? well how you set up the collective pitch/throttle curves of your helicopter depends to a large degree on what sort of flying you are going to do and this is not just modelling its politics! I saw a meeting recently between two well known model heli pilots, one a fine scale pilot, the other shall we say, not unknown for speed. The topic of flying style had not been going long before some very basic Anglo-Saxon terminology was being exchanged. Suffice to say, in the eyes of the other, they were respectively members of the 'Antiquated Flatulence' Brigade, and 'Rectal' School of flying. So I have resigned myself to getting 'flack' pretty much whatever I say here. Since this article is quite a bit heavier going than my previous W3MH offerings I would be interested to hear if this is the sort of thing you want. You can contact me by Email as ColinM@Lance.co.uk.
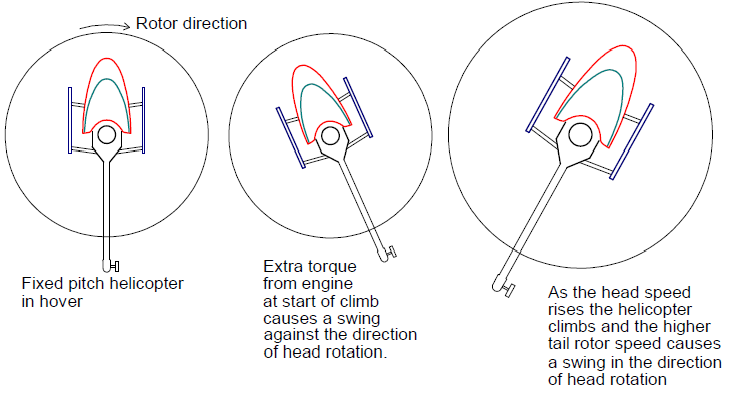
Fixed Pitch handlingBefore I get into the actual setting up of the pitch/throttle relationship I think it would be handy to start by looking at what's 'wrong' with having fixed pitch in order to see what we want from our collective pitch systems. I say 'wrong' in quotes because there have been (and still are) some quite respectable fixed pitch designs. With a fixed pitch helicopter, the lift can only be controlled by changing the rotor RPM. So, to go from the hover to the climb we have to accelerate the rotor. Because of the inertia of the blades we have to increase the torque being transmitted to the main rotor. Now this doesn't instantly increase the revs it just causes them to build steadily so there's a delay between opening the throttle and the heli starting to climb. This sort of delay accompanies all the lift changes of the fixed pitch machine and needs to be compensated by some anticipation on the part of the pilot, especially in descents! The change in the main rotor RPM also means a change in the tail rotor RPM. Now, in going from the hover to the climb the initial increase in torque to the main rotor demands more thrust from the tail rotor and hence more tail rotor pitch. Once the RPM builds up the torque from the motor falls back somewhat and the extra revs make the tail rotor more effective so less tail rotor pitch will be needed. So the transition from hover to climb is accompanied by a tail swing first in one direction and then in the other. This makes control of the tail on fixed pitch machines more 'interesting' for the pilot.
 The Collective Alternative
The Collective AlternativeWith a collective pitch model we have the opportunity are trying to maintain a constant rotor RPM. If we achieve this our example of transitioning from the hover to the climb goes like this. The collective pitch of the main rotor blades is increased to create the extra lift while the throttle is opened so the engine provides just the right amount of extra torque to 'pay' for this extra lift. In this way the model settles into a steady climb quickly without any change in head speed or the delays associated with them. There will still need to be an increase in tail rotor pitch to compensate for the extra engine torque. But since the RPM of the tail is constant the efficiency of the tail will not change and maintaining a steady heading will be easier. Another advantage is that, with suitable gearing, we can ensure that the engine is constantly run at its optimum RPM so full power is immediately 'on tap'.
Where does the power go?I suppose the next thing we n ed to know is where the engine power goes. This can be a very involved study and I'll come back to it in later articles but for now I'll just apologise for the minor bits I'm going to miss out. Broadly speaking we can split the power requirement up like this. First we need some power simply to drive the main blades through the air even when they are not producing any lift (This is called Profile Drag Power). Next, to produce lift we need to throw air downwards and this also takes power (called Lift Power or Induced Power). We also need power to drive the tail rotor and, in forward flight, power to push the bodywork through the air (Parasitic Drag Power). Finally, in a climb we need power simply to raise the weight of the helicopter. I don't want to put anyone off by going into the equations but I think some typical figures could be handy. Taking a '30' sized helicopter with a rotor span of 1.25metres and weighing 2.75kg hovering with a head speed of 1750 RPM we get:
Profile Drag Power = 210 watts (0.28 HP) Induced Power = 90 watts (0.12 HP)
Tail Rotor Power = 25 watts (0.03 HP)
Every 1Metre/second rate of climb will need about a further 25 watts. (Conversely, a descent will provide about 25 watts for every 1Metre/second rate of fall)
So we need about 325 watts from the engine to hover this helicopter. As yet we haven't tied the power to the actual collective pitch. Again, without going into the equations the heli in this example will hover at 1750 RPM at a collective pitch of about 4 degrees. Also, If the collective pitch is reduced to about -4 degrees the rotor speed will be maintained in an autorotation with the power required coming from the falling weight of the helicopter. So at last we have two points that we can use as a guide to the power required at each collective pitch setting. I say 'ideal' only ever going to be a compromise since forward flight will modify the requirements and such things as'vortex ring effects' also ruin this simple picture.
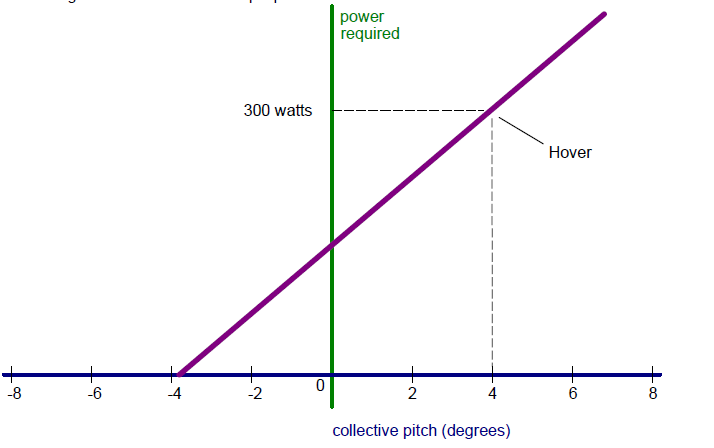
To complete the picture we need to know something about the engine. According to the manufacturers a typical '30' motor puts out roughly 750 watts (1HP). However the manufacturers usually don't quote the conditions under which they measured the output. I would bet that these figures are often for 30% nitromethane (even nitroglycerine perhaps) and an open exhaust. Anyway, if we knock off a bit for the manufacturers optimism and a bit for losses in the gears etc. we can perhaps rely on 650 watts actually getting to the blades. If we assume that the power output of the motor is proportional to the throttle opening (and that's a pretty big assumption) we can see from these figures is that we are going to need something like one third throttle just to provide the Profile Drag Power needed to get the blades going through the air at the required speed. To provide the induced power for the hover needs about a further sixth of throttle movement taking us to about half throttle at the hover.
So at last we get a likely pitch/throttle 'curve' like this
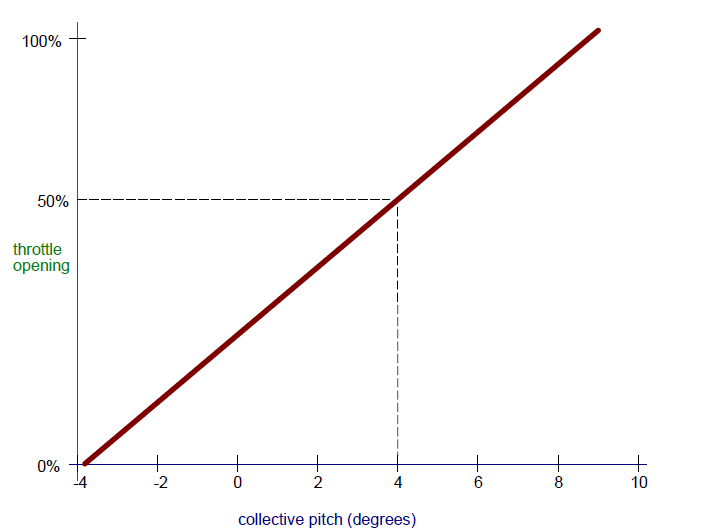
This gives us a basis for a typical 'normal' pitch/throttle curve that will, in level, upright
flight give us a
substantially constant head RPM as we climb or descend. There are a variety of other arrangements
A trainer SetupNow, if your a complete beginner who is just at the hopping-about-on-the-ground stage you will have some slightly different priorities and I would suggest you use a somewhat different pitch/throttle arrangement. Why? Well, until you learn the error of your ways, your natural panic reaction will be to shut the throttle sharply. If this also applies say -4 degrees of collective pitch the machine is going to dump itself very firmly onto the ground. In all too many cases this will result in a 'boom strike' (one of the main blades, going at about 200mph, coming into contact with the boom) I would suggest that, initially, you use a pitch range with a low point of say +1 degree. This will reduce the chances of a boom strike until a suitably gentle touch with the throttle can be learned. At the risk of making this sound like a commercial, a few hours spent on a simulator at this stage can save you a lot of hours spent rebuilding your heli. Before progressing to flying circuits its a good idea to get used to having more negative pitch available. If you try flying a circuit without enough negative pitch then extra care will be needed as you loose height since descent is going to be accompanied by a fall in head speed. Having a reduced head speed at the bottom of the descent will reduce the amount of lift available to arrest the sink and you could just find the ground intervening in the equation. The beginner may also want to restrict the top end of the pitch range somewhat to reduce the maximum rate of climb, however, if you take this to extremes you are in danger of re-inventing the fixed pitch helicopter, complete with the handling! If your Tx allows you could reduce the top of the throttle curve to go with the limited top end pitch.
I guess that's about enough for now. Next time I'll look at alternative pitch/throttle arrangements and tie this in with tail rotor compensation. Unfortunately, I don't think I've been controversial enough this time so let me just leave you with this. So far I have not made any reference to the position of the throttle stick, and that's because, so long as you get the relationship between the throttle and the pitch right, it mattereth not about the stick position. (The distant rumble you can now hear comes from the legions of the 'A.F.' Brigade getting out their quill pens for battle).
Well, baring any lynchings or plumb-duffpoisoning I'll be back in 1996. In the meantime I hope you all have a very merry Christmas



 Translations for our friends around the world.
Translations for our friends around the world. Topic: Setting up the Collective pitch / throttle by Dr Colin Mill: W3MH issue 2 (Read 5623 times)
Topic: Setting up the Collective pitch / throttle by Dr Colin Mill: W3MH issue 2 (Read 5623 times)
 Similar topics (3)
Similar topics (3)

